E91 Assignment 6
Task: Pick up and put down feet.
This week, you will add functionality to the code from last week's assignment in order to pick up and put down the robot's feet while using the ZMP to balance:
To do so, you will need to supply trajectories for each foot based upon the timing and location of the ZMP:
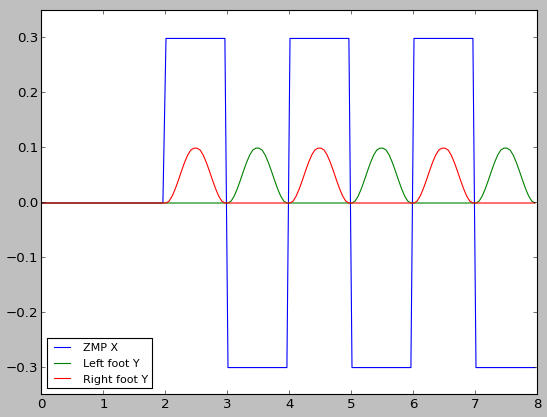
You should design the foot trajectories in a physically plausible manner: this means respecting the fact that a foot can't change position or velocity instantaneously. I expect to see smooth motion as plotted above.
What to turn in
Webpage. Movies. Be prepared to discuss in class. You know the drill.
Also, I expect to be able to check out the turnin branch of your group's repository and grab the code for this assignment from the python/assignment6 subdirectory.