
Matt Zucker
On sabbatical leave for the 2025-2026 academic year
Office: Singer 235 | mzucker1@swarthmore.edu
I am a full professor in the Engineering department at Swarthmore College.
As an undergraduate, I majored in Cognitive Science at Vassar College, where I first began to appreciate taking a multidisciplinary approach to AI and robotics. Before grad school I worked for 5 years at Bluefin Robotics writing software for autonomous underwater vehicles, starting out as an undergraduate intern and departing as a senior software engineer. In 2005, I started my PhD at the Robotics Institute at Carnegie Mellon University, where I studied behavior generation for legged robots and mobile manipulators. My dissertation research focused on combining numerical optimization and machine learning to improve the capabilities of robot motion planning software.
I've been at Swarthmore since 2010, where my research interests have moved beyond robotics into a number of related areas such as computer vision, computer graphics, laboratory automation for biology researchers, rapid prototyping, and CNC machining.
Here is my CV. You might also want to look at my coding blog.
Here is some advice for prospective graduate students, and related advice for students seeking recommendations from me.
Courses taught
Selected publications
Swarthmore student co-authors are highlighted. Please visit my Google Scholar page for a more complete listing.
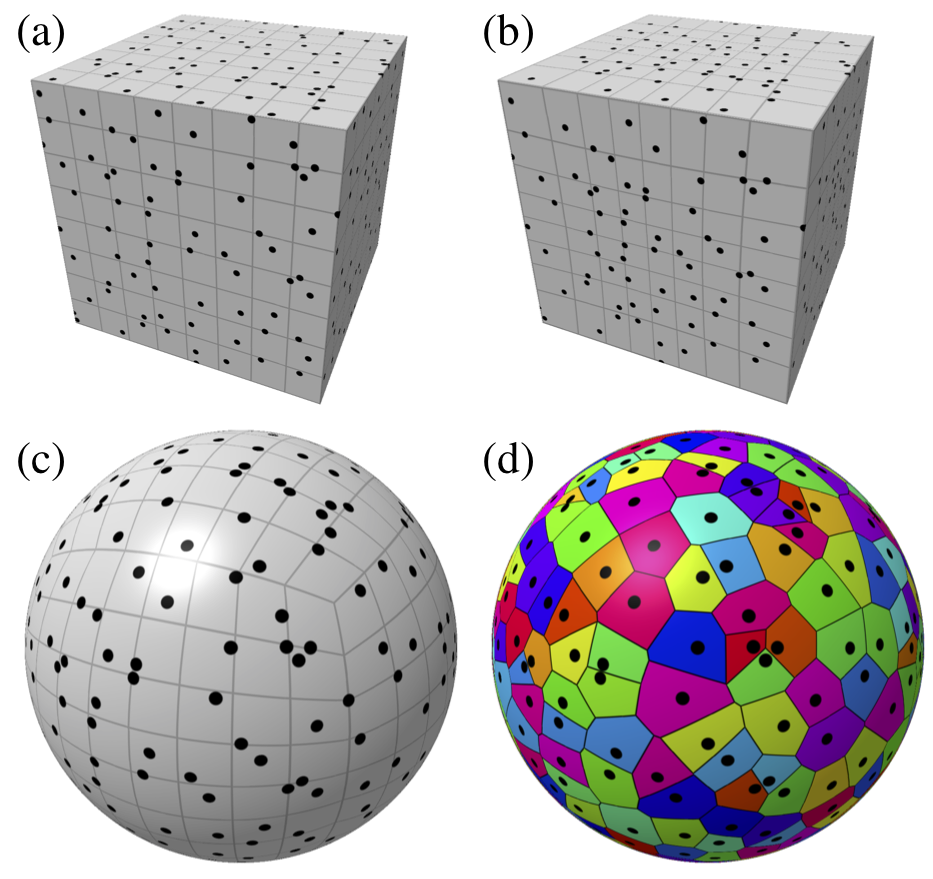
Cube-to-sphere projections for procedural texturing and beyond
M. Zucker and Yosuke Higashi '18. Journal of Computer Graphics Techniques, 2018.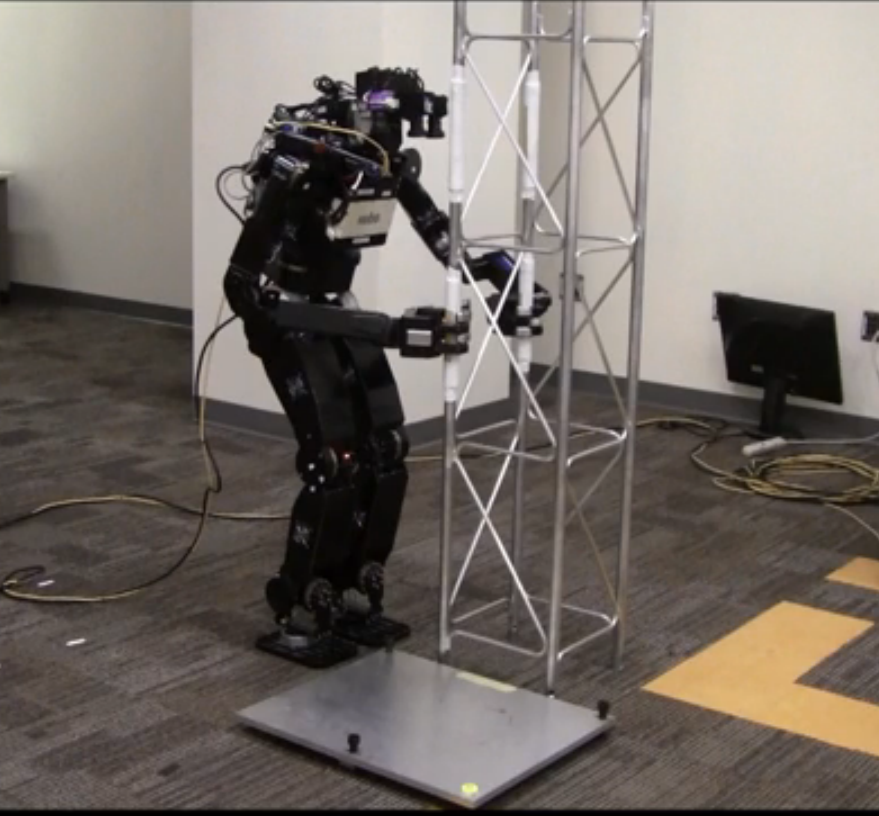
Planning heavy lifts for humanoid robots
M.X. Grey, S. Joo, and M. Zucker. Proc. IEEE-RAS Int’l Conf. on Humanoid Robotics, 2014.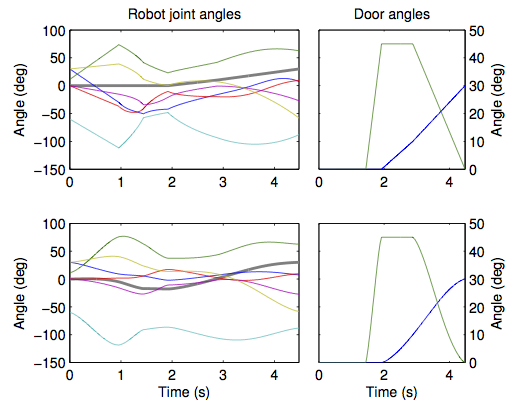
Multigrid CHOMP with local smoothing
Keliang He '13, Elizabeth Martin '13, and Matt Zucker. Proc. IEEE-RAS Int’l Conf. on Humanoid Robotics, 2013.
CHOMP: Covariant Hamiltonian Optimization and Motion Planning
Matt Zucker, Nathan Ratliff, Anca D. Dragan, Mihail Pivtoraiko, Matthew Klingensmith, Christopher M. Dellin, J. Andrew Bagnell, and Siddhartha S. Srinivasa. International Journal of Robotics Research, May 2013.
Optimization and Learning for Rough-Terrain Legged Locomotion
Matt Zucker, Nathan Ratliff, Martin Stole, Joel Chestnutt, J. Andrew Bagnell, Christopher G. Atkeson, and James Kuffner. International Journal of Robotics Research, February 2011.
Continuous trajectory optimization for autonomous humanoid door opening
Matt Zucker, Youngbum Jun, Brittany Killen, Tae-Goo Kim, and Paul Oh. Proc. IEEE Int'l Conf. on Technologies for Practical Robot Applications (TePRA), 2013.
Reinforcement Planning: RL for Optimal Planners
Matt Zucker and J. Andrew Bagnell. Proc. IEEE Int'l Conf. on Robotics and Automation, 2012.
CHOMP: Gradient Optimization Techniques for Efficient Motion Planning
Nathan Ratliff, Matt Zucker, J. Andrew Bagnell, and Siddhartha Srinivasa. Proc. IEEE Int'l Conf. on Robotics and Automation, May, 2009.Extracurricular interests
Features/Press appearances
Videos
Opening doors with the DRC-HUBO robot, using Multigrid CHOMP:
Getting Hubo walking during spring break 2013:
Robot solving a marble maze toy, June 2011
Rough terrain walking using the LittleDog quadruped robot: